Síntomas de un Sensor MAP Defectuoso
Un sensor de Presión Absoluta del Múltiple (MAP) en mal estado puede alterar la distribución de combustible y el ajuste del encendido. Dependiendo del modelo de su vehículo, el motor puede experimentar uno o varios de estos problemas de rendimiento:
- Relación aire-combustible rica
- Relación aire-combustible pobre
- Baja economía de combustible
- El motor no arranca
- Falta de potencia del motor
- Marcha mínima inestable
- Detonación y fallos de encendido
Sin embargo, estos síntomas no son exclusivos de un sensor MAP defectuoso. A veces, un sensor en mal estado puede encender la luz de verificación del motor (CEL). Si se ha almacenado un código de falla en la memoria de la computadora que indica un problema con el sensor MAP, es una buena idea probar realmente el sensor para confirmar que el problema proviene de este y no de otro componente relacionado.
Lo que necesitará para diagnosticar un sensor MAP
Diagnosticar un sensor MAP es un procedimiento sencillo que utiliza un multímetro digital (DMM) y una bomba de vacío manual. Si no tiene la bomba, su tienda local de autopartes puede prestarle una.
En las siguientes secciones, encontrará información importante sobre el sensor, elementos a considerar durante su inspección y un procedimiento de prueba simple del sensor MAP. Tenga en cuenta que estas pruebas se aplican a motores de gasolina de cuatro tiempos de combustión interna sin turbo ni compresor. Si es necesario, consulte el manual de reparación del vehículo para su modelo específico.
Respuestas que encontrará en este artículo
I. ¿Qué hace un sensor MAP?
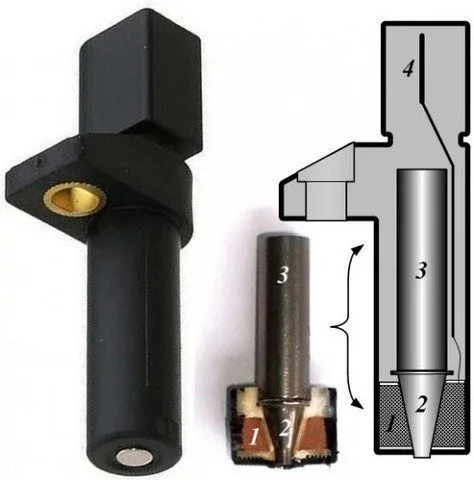
Básicamente, un sensor MAP lee la cantidad de presión de aire en relación con el vacío dentro del múltiple de admisión, directamente o mediante un tubo de vacío. Luego, traduce esta presión en una señal de voltaje que el sensor envía al Módulo de Control del Tren de Potencia (PCM), la computadora de su automóvil.
El sensor utiliza una señal de referencia de 5 voltios proveniente de la computadora para devolver la señal.
Los cambios de vacío o presión de aire en el múltiple de admisión hacen variar la resistencia eléctrica del sensor, aumentando o reduciendo el voltaje de la señal hacia la computadora.
El PCM utiliza la información del sensor MAP junto con los datos de otros sensores para ajustar la distribución de combustible a los cilindros y el calado del encendido según la carga y la velocidad actuales del motor.
2. ¿Mi coche tiene un sensor MAP?
En lugar de un sensor MAP, la mayoría de los vehículos modernos utilizan un sensor de Flujo de Aire Masivo (MAF) que la computadora utiliza para calcular el flujo de aire así como las RPM del motor.
Algunos vehículos están equipados con un sensor MAP y MAF, generalmente en sistemas de inducción forzada como modelos turboalimentados y sobrealimentados.
A veces, el sensor MAP se utiliza para monitorear el funcionamiento de la Válvula EGR y sirve como respaldo del sensor MAF.
Si necesita información concerniente a su vehículo, consulte el manual de reparación de su marca y modelo particulares. Puede comprar un manual Haynes económico en Amazon. Estos manuales contienen procedimientos para muchos proyectos de mantenimiento, diagnóstico y reemplazo de componentes. El manual es prácticamente rentable después del primer proyecto de mantenimiento o reparación.
Atención: Al verificar los voltajes
Utilice el manual de reparación de su marca y modelo de vehículo particular para las especificaciones de valor de diagnóstico.
3. P0105 y otros códigos de falla del MAP
A veces, un mal funcionamiento del sensor MAP o de su circuito enciende la luz de verificación del motor (CEL).
Escaneando la computadora, puede encontrar una serie de códigos P010X almacenados en la memoria.
Aquí tiene una breve descripción de estos códigos:
- P0105: Mal funcionamiento del circuito del sensor MAP.
- P0106: Fallo del circuito, rango o rendimiento del sensor MAP.
- P0107: Circuito, entrada baja.
- P0108: Circuito del sensor MAP, entrada alta.
- P0109: Circuito del sensor MAP, falla intermitente.
Otros códigos asociados incluyen P0068 y P0069.
Puede encontrar una descripción más detallada de estos códigos en el manual de reparación de su vehículo o realizando una búsqueda en línea.
Lea atentamente la descripción del código que encontró y la causa del error potencial resultante de este código.
No olvide que aunque el código apunta hacia el problema potencial, el circuito o componente concerniente puede no ser el causante. En su lugar, un componente asociado pudo haber activado el código.
Por ejemplo, en muchas aplicaciones, un tubo de vacío con fugas o un mal sensor de Posición del Acelerador (TPS) puede provocar un código de falla que apunta hacia un sensor MAP defectuoso.
Diagnosticar el sensor es la única manera de determinar si el sensor o la pieza está realmente defectuosa.
En algunos modelos, solo necesita retirar unos pocos tornillos para acceder al sensor.
4. Ubicación del sensor MAP
El sensor MAP generalmente se encuentra en algunos lugares clave alrededor del área superior del compartimiento del motor.
- Múltiple de admisión. Debajo o cerca del cuerpo del acelerador; quizás sea el lugar más común.
- Guardabarros interno.
- Tablero de fuego (firewall).
- Conjunto del filtro de aire.
- Debajo del tablero de instrumentos.
El sensor puede conectarse al múltiple de admisión con un tubo de vacío o directamente, estando montado sobre el múltiple de admisión.
Atención: Al usar un multímetro digital
Utilice siempre un multímetro digital con una impedancia mínima de 10 megaohmios, para evitar dañar los dispositivos electrónicos y eléctricos sensibles de su vehículo.
5. Cómo probar un sensor MAP
Al probar un sensor MAP, realice primero una verificación preliminar.
El sensor se conecta al múltiple de admisión con un tubo de goma, según su aplicación particular; de lo contrario, se conecta directamente a la admisión.
Cuando surgen problemas, es más probable que el tubo de vacío sea el defectuoso. En el compartimiento del motor, el interior del sensor y la manguera están expuestos a altas temperaturas, contaminación potencial por aceite y combustible, y vibraciones que pueden afectar su funcionamiento.
Verifique el tubo de vacío para detectar:
- Conexiones flojas
- Grietas
- Hinchazón
- Ablandamiento
- Endurecimiento
Luego, verifique que el cuerpo del sensor no esté dañado y asegúrese de que la conexión eléctrica esté bien ajustada, limpia y que el cableado esté en buen estado.
Compare sus lecturas con las especificaciones listadas en el manual de reparación de su vehículo.
6. Verificación de la señal de referencia del sensor MAP
El sensor MAP utiliza un conector de tres cables. Debe identificar los cables de señal, referencia y tierra utilizando el manual de reparación de su vehículo.
Verificación del voltaje de referencia:
Gire la llave de encendido a la posición On (Encendido) pero no arranque el motor. Esto permitirá que la computadora proporcione un voltaje de referencia al sensor MAP.
Ajuste su multímetro a aproximadamente 10 V en la escala de Corriente Continua (DCV).
Toque con la sonda el cable de referencia en el conector. La lectura debe indicar 5 voltios o cerca de ello.
Si su voltaje es inferior, inspeccione visualmente el conector y el cable entre el sensor y el PCM para detectar cualquier daño. Es posible que deba medir este voltaje en el mismo cable, pero del lado de la computadora.
Si aún obtiene un voltaje bajo del lado de la computadora, debe verificar la computadora.
De lo contrario, si el voltaje sube a 5 voltios, hay un problema en el cable entre la computadora y el sensor.
Apague la llave de encendido.
Verificación del voltaje de la señal:
Desconecte el tubo de vacío del sensor.
Conecte una bomba de vacío manual al sensor, pero no aplique vacío todavía.
Toque con la sonda la señal en el conector eléctrico usando la sonda roja del DMM. Conecte la sonda negra del DMM a tierra usando cualquier superficie metálica en el motor o el terminal negativo de la batería.
Gire el interruptor de encendido a la posición On, pero no arranque el motor.
Su lectura de voltaje debe estar entre 4.6 y 5 voltios.
Aplique 5 in-Hg (pulgadas de mercurio) de vacío al sensor. La lectura debe ser de aproximadamente 3.75 voltios.
Ahora, aplique 20 in-Hg de vacío al sensor. El voltaje debe ser de aproximadamente 1 voltio.
Sus lecturas pueden variar ligeramente, dependiendo de la altitud y las condiciones climáticas actuales.
NOTA: En algunos manuales de reparación, se le solicita verificar la resistencia al aplicar vacío al sensor. Siga las instrucciones de su manual y compare sus resultados con las especificaciones listadas.
La siguiente tabla muestra la caída de voltaje aproximada de la señal de retorno del sensor MAP cuando se aplica una cantidad específica de vacío. Utilice estos valores como referencia general.
Vea también el video hacia el final de este artículo que le da una referencia visual sobre la solución de problemas de un sensor MAP analógico usando un multímetro digital y una bomba de vacío manual.
Tabla de Referencia de Caída de Voltaje del Sensor MAP
| Vacío |
Caída de Voltaje |
| 5 in-Hg |
0.7 a 1.0 Voltios |
| 10 in-Hg |
1.3 a 1.9 Voltios |
| 15 in-Hg |
2.0 a 2.8 Voltios |
| 20 in-Hg |
3.0 a 3.8 Voltios |
7. Prueba de un sensor MAP digital
Si su vehículo utiliza un sensor MAP digital, en lugar de uno analógico, también puede probarlo usando un multímetro digital capaz de medir señales de frecuencia.
Primero, ajuste su multímetro a aproximadamente 100 o 200 hertz.
Desconecte el tubo de vacío del sensor y conecte una bomba de vacío manual al puerto de vacío del sensor.
Toque con la sonda los cables de señal y tierra en el conector eléctrico del sensor.
Gire la llave de encendido a la posición On pero no arranque el motor.
Tome nota de las lecturas de voltaje, ciclo de trabajo y frecuencia en su medidor.
Ahora, aplique aproximadamente 18 in-Hg de vacío al sensor y anote las lecturas de voltaje, ciclo de trabajo y frecuencia en su medidor.
Su sensor debe tener aproximadamente las mismas lecturas de voltaje y ciclo de trabajo en ambas pruebas.
Sin vacío aplicado, el sensor debería tener alrededor de 160 hertz.
Una vez aplicado el vacío, el sensor debería caer a aproximadamente 100 hertz.
Consulte el manual de reparación de su vehículo para las especificaciones.
En algunos modelos, es posible que necesite usar un destornillador o una punta Torx para retirar el sensor MAP.
8. Reemplazo del sensor MAP
Reemplazar un sensor MAP es una operación simple. A veces, el sensor es de fácil acceso y puede reemplazarlo en unos 5 minutos o menos; otras veces, es posible que deba retirar uno o varios accesorios para acceder a él.
Sea como sea, el siguiente procedimiento le ayudará a reemplazar el sensor. Si el sensor de su vehículo utiliza un tubo de vacío, es una buena idea reemplazarlo junto con el sensor.
Procedimiento de Reemplazo:
Consulte su manual de reparación de vehículo, si es necesario.
- Desconecte el cable negativo de la batería y asegure el cable lejos del polo.


Signos comunes de un servofreno defectuoso
¿No estás seguro si tienes un servofreno en mal estado?
Aquí tienes tres signos comunes de un fallo en el servofreno:
- Necesitas hacer más fuerza para aplicar los frenos (pedal del freno duro).
- El pedal del freno no regresa por sí solo a su posición original.
- Las revoluciones del motor disminuyen cuando pisas el pedal del freno en ralentí.
(más…)
Introducción al Sistema Informático

Los vehículos actuales incorporan computadoras para monitorizar o controlar casi todos los sistemas del vehículo. Muchos sistemas informáticos comparten información proveniente de sensores comunes.
Las computadoras están interconectadas mediante un enlace de datos llamado multiplexación. Algunas computadoras funcionan en conjunto para controlar diferentes aspectos del vehículo. El control automático de tracción forma parte del sistema de frenos antibloqueo, pero si el sistema detecta el deslizamiento de una rueda, puede comunicarse con la computadora del motor para reducir la potencia y aplicar el freno en la rueda que patina. Puede procesar esta información y tomar decisiones entre 5 y 100 veces por segundo, dependiendo del sistema.
El sistema informático del motor, llamado Módulo de Control del Motor (ECM) o Módulo de Control del Tren de Potencia (PCM), utiliza una variedad de sensores de entrada e interruptores para obtener información. El procesador del ECM utiliza esta información para tomar decisiones. La computadora controla las salidas, como los inyectores, ventiladores, solenoides y relés, para operar los diferentes componentes.
Un viejo dicho sobre las computadoras sigue siendo válido para nuestros vehículos hoy en día: “Entra basura, sale basura”. Si la información que llega a la computadora es defectuosa, el sistema no funcionará correctamente.
Computadoras Automotrices
Una computadora es un dispositivo de procesamiento y control que tiene diversos niveles de complejidad según el sistema que monitoriza o controla. Las computadoras albergan una variedad de componentes dentro de la infame “caja negra”. La computadora también cuenta con un sistema de autocontrol integrado para monitorizar el funcionamiento del sistema y definirá y almacenará códigos de error o fallo. Una computadora puede tener varios nombres según el fabricante y lo que controle. Una computadora del motor puede llamarse: Módulo de Control del Motor (ECM), Módulo de Control del Tren de Potencia (PCM), Conjunto de Control del Motor (ECA), Módulo de Control del Motor (MCM), Módulo de Control de Carrocería (BCM) o Unidad de Control Electrónico (ECU). Las secciones principales de la computadora son el procesador, la memoria, los reguladores de voltaje, los convertidores analógico-digitales, los acondicionadores de señal y los controladores de salida.
Memoria de la Computadora
La memoria se clasifica en categorías que reflejan su volatilidad o la capacidad de borrado. Esto también tiene que ver con la importancia de la información y si necesita ser modificada.
- ROM (Memoria de Solo Lectura): Es una memoria que no se puede modificar y no se pierde si se desconecta la batería. Aquí se contiene el sistema operativo básico y otra información vital.
- PROM (Memoria de Solo Lectura Programable): Es una memoria que se instala en fábrica y no se puede modificar. La PROM solía ser un chip removible que debía reemplazarse si se necesitaba un cambio. Caterpillar la llamó “módulo de personalización”, que contenía información específica del motor y el vehículo.
- E-PROM (PROM Borrable): Contiene la misma información que una PROM pero puede modificarse una o dos veces.
- EE-PROM (PROM Borrable Eléctricamente): Contiene la misma información que una PROM pero puede modificarse repetidamente. La mayoría de los vehículos actuales utilizan EE-PROM porque puede reprogramarse infinitas veces.
- RAM (Memoria de Acceso Aleatorio): Es el bloc de notas de la computadora, con información en constante cambio. Muchos vehículos hoy tienen la capacidad de “aprender” estilos de conducción, mínimos/máximos de los sensores y velocidades de ralentí. Esta información se mantiene hasta que la computadora deja de funcionar o se desconectan las baterías. Tras una pérdida de energía, esta información podría perderse. En ocasiones, el vehículo puede funcionar de forma irregular hasta que “vuelve a aprender”. KAM (Memoria de Mantenimiento) es otra forma de memoria volátil.
Reguladores de Voltaje
La computadora funciona a un voltaje inferior al del resto del vehículo. Anteriormente mencionamos la referencia de 5 voltios (VREF). Se trata de un voltaje de referencia de 5 voltios enviado a muchos sensores. Este voltaje debe ser muy preciso y estable; de lo contrario, las lecturas del sensor no serían precisas. Algunos fabricantes permiten una variación de 0.2 voltios; otros, de apenas 0.04 voltios. Si por alguna razón los reguladores de voltaje fallan, pueden aparecer códigos de error para varios sensores debido a que el voltaje de los sensores se corta.
Convertidores A a D: Convertidores Analógico-Digitales
Un convertidor “A a D” transforma un voltaje constante en números digitales (pulsos) o un voltaje alterno en una señal digital de corriente continua. Las computadoras son digitales y de CC, y no entienden nada más. El convertidor A a D actúa como un traductor que convierte señales que la computadora no puede entender en algo que pueda utilizar. La computadora funciona realmente con código binario, que es “0” y “1” o encendido/apagado. Es mucho más fácil traducir una señal digital que una analógica. Algunas señales son de bajo voltaje y también pueden necesitar amplificación.
Controladores de Salida
Los controladores de salida son transistores utilizados para controlar la potencia o la tierra (generalmente la tierra) a dispositivos como: solenoide del inyector, solenoide de la válvula moduladora, relé de A/C, solenoide del ventilador, relé del calentador de admisión, relé del motor de arranque, solenoides EGR, por nombrar algunos que la computadora puede controlar. El transistor es como un relé de estado sólido sin partes móviles. Algunas computadoras del motor tienen un módulo controlador separado. Dado que estos dispositivos de salida generan la mayor parte del calor en la computadora, muchas utilizan un diseño con aletas o una placa de refrigeración para disipar el calor.
Consejo de Mantenimiento: Los controladores de salida son muy sensibles a las sobrecorrientes (amperaje) y pueden quemarse fácilmente si alguien utiliza un puente o un procedimiento de prueba incorrecto. Si tiene un código de error para el controlador del inyector nº 5, es probable que el controlador del inyector nº 5 esté quemado. Verifique la resistencia del solenoide del inyector nº 5. Una resistencia baja o un cortocircuito podría aumentar el amperaje y dañar el controlador del inyector.
Función del Sistema Informático
Los sistemas informáticos se dividen en tres áreas: entrada, procesamiento y salida. La entrada a la computadora proviene de sensores e interruptores. El procesamiento se realiza dentro de la computadora. Las salidas son dispositivos como solenoides, inyectores, válvulas reguladoras de presión, relés e indicadores luminosos.
El sistema informático funciona completamente con voltaje. La mayoría de los sensores convierten una señal de voltaje, generalmente de 5 voltios, en un voltaje entre 0 y 5 voltios. Este voltaje es entonces interpretado por la computadora como temperatura, presión o posición. Algunos sensores envían un voltaje analógico a la computadora, lo que significa que es un voltaje constante o variable, y otros envían una señal digital de CC, que es una señal de encendido/apagado o de nivel alto/bajo. Cuando un técnico conecta una herramienta de escaneo o una computadora al sistema, lee las temperaturas en grados, las presiones en PSI y las posiciones en porcentajes. La computadora ha traducido estas lecturas para nosotros. La computadora introduce la información del sensor junto con otra información en un algoritmo y proporciona una respuesta sobre qué hacer para operar el sistema.
La computadora es una colección de componentes como memoria, procesadores, convertidores analógico-digitales, reguladores de voltaje, placas de circuitos impresos y transistores, muy similar a una computadora doméstica. Sin embargo, las computadoras de los vehículos deben soportar muchas más variables de temperatura, vibración y entorno. Dicho esto, las computadoras que ejecutan los sistemas en nuestros vehículos son muy confiables.
Cuando la computadora toma una decisión a partir de la información proporcionada, opera dispositivos como solenoides, relés, motores e indicadores luminosos. Muchos circuitos del dispositivo de salida se controlan desde el lado de tierra del circuito. Dado que la mayoría de los circuitos de la computadora son de bajo amperaje, esta puede utilizar un relé para controlar un circuito de mayor amperaje.
Ejemplo: La bobina del embrague de A/C es un electroimán de alto amperaje (10A). El embrague de A/C se activa o desactiva por la computadora. La computadora controla la trayectoria a tierra de la bobina del relé de A/C (pines 85 y 86), que es de bajo amperaje (0.15A). El magnetismo generado por la bobina del relé cierra el contacto NA (Normalmente Abierto: 30 a 87) dentro del relé y conecta el alto amperaje a la bobina del A/C. Esto permite a la computadora controlar un dispositivo de alta intensidad con un circuito de control de baja intensidad.
Cuando la computadora detecta un problema, enciende la luz de mal funcionamiento o MIL. Cuando esto ocurre, almacena un código de falla que el técnico puede recuperar. Un problema en un circuito generalmente tiene una de tres causas: la computadora (muy raro), el componente (40% o más) y el cableado (40% o más). Esto significa que la mayoría de las veces, el problema estará relacionado con los componentes o el cableado.
Sensores de Temperatura
 para convertir el voltaje en temperatura.")
Un sensor de temperatura también se llama termistor. La resistencia en su interior es sensible a la temperatura. Cuando la temperatura cambia alrededor de la resistencia, su valor de resistencia cambia. Hay dos tipos de termistores utilizados en vehículos: Coeficiente de Temperatura Negativo o NTC, que es el más común, y Coeficiente de Temperatura Positivo o PTC, raramente utilizado en vehículos.
- Los termistores NTC aumentan la resistencia cuando la temperatura desciende y disminuyen la resistencia cuando la temperatura aumenta. La resistencia y la temperatura van en direcciones opuestas.
- Los termistores PTC aumentan la resistencia cuando la temperatura aumenta y disminuyen la resistencia cuando la temperatura desciende. La resistencia y la temperatura van en la misma dirección.
La computadora envía un voltaje de 5 voltios al sensor y monitoriza el voltaje de retorno.
- El sensor tiene dos cables: el cable de 5 voltios y un cable de tierra.
- El sensor tiene dos terminales que se conectan a la resistencia del sensor.
- El circuito debe estar completo para que el sensor se lea correctamente. Si el cable de 5 voltios o el de tierra tienen un problema, el sensor no se puede leer correctamente. Esto generalmente dará una lectura de temperatura de aproximadamente -36 °F. Es una pista evidente: el circuito del sensor está abierto.
- El sensor debe estar expuesto a la temperatura del aire o fluido que detecta.
Los termistores NTC se utilizan para, entre otras, lecturas de:
- Temperatura del Líquido Refrigerante del Motor o ECT
- Sensor de Temperatura del Aire Ambiental o AAT
- Temperatura del Aire del Múltiple o MAT
- Temperatura del Aceite de la Transmisión o TOT
- Temperatura del Eje Motor
- Temperatura del Combustible o FTS
Potenciómetros
Los potenciómetros son sensores de posición. El potenciómetro más popular es el sensor de posición del acelerador, ubicado en el cuerpo de mariposa o en el pedal del acelerador. En esta sección, usaremos el Sensor de Posición del Acelerador (TPS), también llamado sensor de posición del pedal del acelerador o pedal electrónico, como ejemplo, ya que es el más común.
Nota: En muchos motores de gasolina, el TPS está ubicado en el cuerpo de mariposa del motor. Con los aceleradores electrónicos o los motores diésel electrónicos, el TPS está ubicado en el pedal del acelerador.
- El TPS utiliza una conexión de tres cables.
- Un voltaje de referencia de 5 voltios o VREF se envía al sensor desde la computadora.
- Circuito de tierra, ya sea a tierra del chasis o a tierra a través de la computadora.
- El cable de señal corresponde al voltaje variable entre 0 y 5 Voltios cuando el brazo del sensor de barrido se desliza sobre la resistencia del sensor.
- El VREF de 5 Voltios es la tensión de fuente del sensor. Estos 5 voltios pueden ser compartidos por otros sensores. Esto significa que un problema en este circuito puede afectar a varios sensores.
- El circuito de tierra completa el circuito de 5 voltios a través de la resistencia a tierra. La tierra también puede ser compartida con otros sensores.
- El cable de señal actúa como un voltímetro midiendo la caída de voltaje a través de la resistencia. Al ralentí o con el pedal en posición de reposo, el voltaje es bajo, generalmente entre 0.5 y 1.0 Voltio.
- Acelerador a fondo o WOT, el voltaje es alto, entre 4.5 y 4.8 Voltios.
- El TPS generalmente establece un código de error si el voltaje del cable de señal es de 0 o 5 voltios. La señal nunca debe alcanzar estos extremos.
Cuando se presiona el pedal, el voltaje aumenta desde un mínimo de aproximadamente 0.5 voltios hasta unos 4.8 voltios. Los primeros sensores TPS eran ajustables, y luego, en sensores TPS posteriores, la computadora “aprendía” los voltajes mínimo y máximo. A través de una herramienta de escaneo o PC, esto generalmente se muestra como una posición del acelerador del 0% al 100%.
Sensores de Presión
Paginación de entradas