
電気モーターは、産業システム、電気自動車、ロボット、および多くの家庭用アプリケーションの中心にあります。その効率性と精密な制御を保証するためには、ローター(モーターの回転部分)の瞬時位置を知ることが不可欠です。ここで重要な役割を果たすのがローター位置センサーであり、電子制御システムに重要な情報を提供するキーデバイスです。本記事では、これらのセンサーの動作原理、利用可能な技術、および実用的な応用について詳しく探求します。
ローター位置センサーの役割
ローター位置センサーには主に2つの機能があります:
- スイッチング制御:ブラシレスモーターでは、電子コントローラーが固定子巻線内の電流のスイッチングをローターの位置と同期させ、最適なトルクを生成する必要があります。
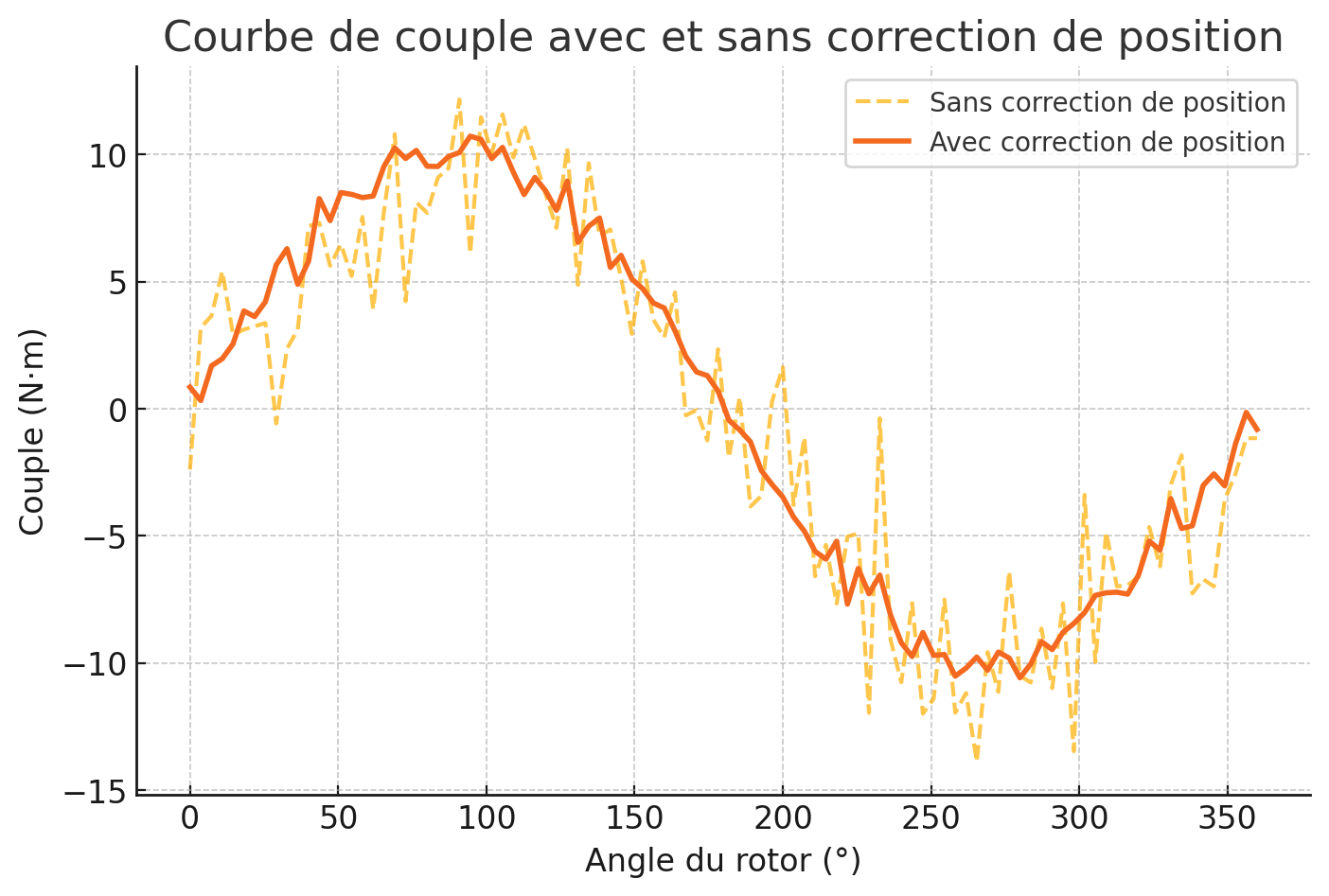
- 位置サーボ制御:精密な位置決めを必要とするシステム(ロボット、CNC)では、センサーがリアルタイムでローターの角度位置を追跡し補正します。
この情報がなければ、モーターは効率を失い、過度に振動したり、誤動作する可能性があります。
位置センサーの技術
ローターの位置を測定するためにいくつかの技術が共存しており、それぞれに利点と欠点があります。
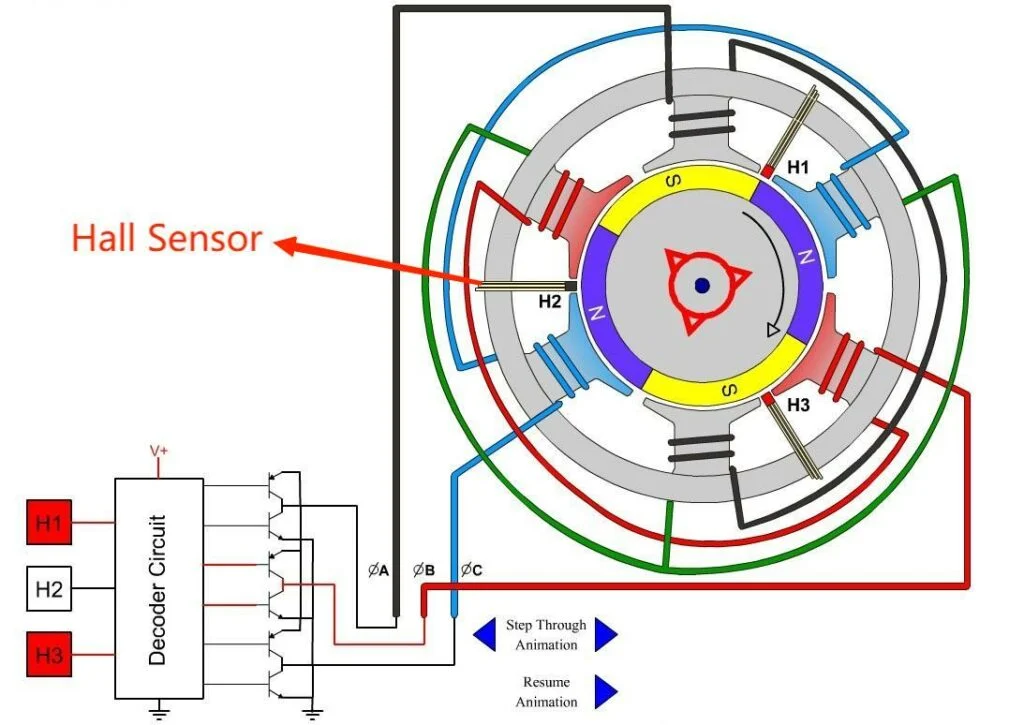
1. ホール効果センサー
- 原理:ホール効果センサーは、ローターに固定された永久磁石によって生成される磁場の変動を検出します。
- 実装:三相モーターでは、しばしば3つのホールセンサー(120度位相差)が位置を決定するために使用されます。
- 利点:低コスト、統合の簡便さ。
- 欠点:限られた分解能(数度の角度精度)、磁気干渉への感度。
2. リゾルバ
- 原理:リゾルバは回転変圧器であり、一次巻線と二次巻線を使用して正弦波信号を介して角度を測定します。
- 実装:ローターはAC信号で励振される巻線を搭載し、固定子には90度位相差を持つ2つの巻線が含まれます。
- 利点:堅牢性(振動、極端な温度、過酷な環境に対する耐性)、高い信頼性。
- 欠点:高コスト、信号をデコードするための専用電子回路の必要性。
3. 光学式エンコーダ
- 種類:
- インクリメンタルエンコーダ:移動に比例したパルスを生成し、ゼロ基準を必要とします。
- アブソリュートエンコーダ:電源遮断後も360度にわたる固有の位置を提供します。
- 原理:ローターに固定されたコード化ディスクが光ビーム(LED/レーザー)を遮断または反射して信号を生成します。
- 利点:高精度(0.001度まで)、高速応答。
- 欠点:塵埃、湿気、機械的衝撃への感度。
4. 誘導式センサー(LVDT、VRS)
- 原理:ローターの位置に応じたインダクタンスまたはリラクタンスの変化に基づきます。
- 例:可変リラクタンスセンサー(VRS)は、ローター上の金属歯を使用してコイル内の磁束を変更します。
- 利点:耐久性、過酷な環境への適応性。
- 欠点:中程度の分解能。
技術比較
| 技術 | 精度 | 堅牢性 | コスト | 典型的な応用 |
|---|---|---|---|---|
| ホール効果 | 低い | 中程度 | 低い | 低価格モーター、ドローン |
| リゾルバ | 中程度 | 非常に高い | 高い | 航空、電気自動車 |
| 光学式エンコーダ | 非常に高い | 低い | 中程度~高い | ロボット、CNC工作機械 |
| 誘導式センサー | 中程度 | 高い | 中程度 | 重工業、産業用モーター |
制御システムへの統合
センサーデータは、モーター電子制御ユニット(ECU)によって処理され、インバーター(DC/AC変換器)を介して固定子電流を調整します。例えば:
- 電気自動車では、コントローラーがローターの位置を使用してトルクと速度を最適化し、エネルギー消費を最小限に抑えます。
- ロボット工学では、アブソリュートエンコーダが電源オフ後の精密な再位置決めを可能にします。
課題と革新
- 過酷な環境:センサーは極端な温度(-40°Cから150°C)、振動、EMI(電磁干渉)に耐える必要があります。
- 小型化:自動車産業は、高密度モーターへの統合のためのコンパクトなセンサーを要求しています。
- センサーレスソリューション:一部のアルゴリズム(フラックスオブザーバー、高周波注入)は物理センサーなしで位置を推定し、コストを削減します。ただし、これらの方法は低速では精度が低いままです。
主要な応用
- 電気自動車:リゾルバとエンコーダがトラクションモーターの精密制御を保証します(例:テスラ、BMW i3)。
- 航空宇宙:電動飛行制御システムでリゾルバが使用されます。
- インダストリー4.0:協働ロボット工学のための同期モーターがエンコーダと組み合わされます。
- 再生可能エネルギー:風力タービンにおけるブレードの位置決め。
将来の展望
位置センサーは以下の方向に進化しています:
- より高速な通信のためのデジタルインターフェース(SPI、CAN FD)。
- 摩耗予測とメンテナンス最適化のためのAI統合。
- 冗長性のためのホール効果と慣性測定(IMU)を組み合わせたハイブリッドセンサー。
結論
ローター位置センサーは、現代の電気モーターの性能を十分に活用するために不可欠なコンポーネントです。精度と信頼性に関する要求が高まる中、技術革新は限界を押し広げ続け、電化と自動化に向かう世界において、ますます野心的な応用を可能にしています。