Introduction au système informatique
Les véhicules d’aujourd’hui ont des ordinateurs pour surveiller ou contrôler presque tous les systèmes du véhicule. De nombreux systèmes informatiques partagent des informations provenant de capteurs communs.
Les ordinateurs sont interconnectés via une liaison de données appelée multiplexage. Certains ordinateurs fonctionnent ensemble pour contrôler différents aspects du véhicule. Le contrôle de traction automatique fait partie du système de freinage antiblocage, mais si le système détecte le patinage d’une roue, il peut communiquer avec l’ordinateur du moteur pour réduire la puissance du moteur et il peut appliquer le frein sur la roue qui tourne. Il peut traiter ces informations et prendre des décisions 5 à 100 fois par seconde selon le système.
Le système informatique du moteur appelé module de commande du moteur (ECM) ou module de commande du groupe motopropulseur (PCM) utilise une variété de capteurs d’entrée et de commutateurs pour plus d’informations. Le processeur de l’ECM utilise les informations pour prendre des décisions. L’ordinateur contrôle les sorties comme les injecteurs, les ventilateurs, les solénoïdes et les relais pour faire fonctionner les différents composants.
Un vieux dicton sur les ordinateurs sonne vrai sur nos véhicules aujourd’hui: «Déchets dedans, Déchets dehors». Si les informations transmises à l’ordinateur sont défectueuses, le système ne fonctionnera pas correctement et ne fonctionnera pas correctement.
Ordinateurs automobiles
Un ordinateur est un dispositif de traitement et de contrôle qui a une variété de niveaux de complexité selon le système qu’il surveille ou contrôle. Les ordinateurs abritent une variété de composants à l’intérieur de la tristement célèbre «boîte noire». L’ordinateur dispose également d’un système d’autocontrôle intégré pour surveiller le fonctionnement du système et définira et stockera les codes d’erreur ou de dérangement. Un ordinateur peut avoir plusieurs noms selon le fabricant et ce qu’il contrôle. Un ordinateur moteur peut être appelé un; Module de commande du moteur (ECM), module de commande du groupe motopropulseur (PCM), ensemble de commande du moteur (ECA), module de commande du moteur (MCM), module de commande du corps (BCM) ou unité de commande électronique (ECU). Les principales sections de l’ordinateur sont le processeur, la mémoire, les régulateurs de tension, les convertisseurs analogique-numérique, les conditionneurs de signal et les pilotes de sortie.
Mémoire d’ordinateur
La mémoire tombe dans des catégories qui reflètent la volatilité ou l’effacement de la mémoire. Cela a également à voir avec l’importance de l’information et si elle doit être modifiée.
La ROM (Read Only Memory) est une mémoire qui ne peut pas être modifiée et n’est pas perdue si la batterie est déconnectée. C’est là que le système d’exploitation de base et d’autres informations vitales sont contenus.
PROM (Programmable Read Only Memory) est une mémoire qui a été installée en usine et ne peut pas être modifiée. La PROM était autrefois une puce amovible qui devait être remplacée si un changement devait être effectué. Caterpillar l’a appelé un module de personnalité qui contenait des informations spécifiques sur le moteur et le véhicule.
L’E-PROM (effaçable PROM) possède les mêmes informations qu’une PROM mais peut être modifiée une ou deux fois.
L’EE-PROM (PROM effaçable électroniquement) possède les mêmes informations qu’une PROM mais peut être modifiée à plusieurs reprises. La plupart des véhicules utilisent aujourd’hui l’EE-PROM car elle peut être reprogrammée une infinité de fois.
RAM (Random Access Memory) est le bloc-notes de l’ordinateur, avec ces informations en constante évolution. De nombreux véhicules ont aujourd’hui la capacité «d’apprendre» les styles de conduite, les minimums / maximums des capteurs et les vitesses de ralenti. Ces informations sont conservées jusqu’à ce que l’ordinateur cesse de fonctionner ou que les batteries soient déconnectées. Après une panne de courant, ces informations pourraient être perdues. À certaines occasions, le véhicule peut rouler ou basculer «drôle» jusqu’à ce qu’il «réapprenne». KAM (Keep-Alive Memory) est une autre forme de mémoire volatile.
Régulateurs de tension
L’ordinateur fonctionne sur une tension inférieure à celle du reste du véhicule. Plus tôt dans cet article, nous avons parlé de VREF 5 volts. Il s’agit d’une tension de référence de 5 volts envoyée à de nombreux capteurs. Cette tension doit être très précise et stable; sinon, les relevés du capteur ne seraient pas précis. Certains fabricants autorisent une variance de 0,2 volt; d’autres aussi petits que 0,04 Volt. Si, pour une raison quelconque, les régulateurs de tension sont défectueux, vous pouvez avoir des codes d’erreur pour plusieurs capteurs en raison de la tension des capteurs qui est coupée.
Convertisseurs A à D: convertisseurs analogiques-numériques
Un convertisseur «A vers D» transforme une tension constante en nombres numériques (impulsions) ou une tension alternative en un signal numérique DC. Les ordinateurs sont numériques DC et ne comprennent rien d’autre. Le convertisseur A vers D est comme un traducteur qui traduit des signaux que l’ordinateur ne peut pas comprendre en quelque chose qu’il peut utiliser. L’ordinateur fonctionne en fait sur du code binaire qui est «0» et «1» ou marche / arrêt. Il est beaucoup plus facile de traduire un signal numérique qu’un signal analogique. Certains signaux sont une tension faible et peuvent également avoir besoin d’être amplifiés.
Pilotes de sortie
Les pilotes de sortie sont des transistors utilisés pour contrôler la puissance ou la masse (généralement la masse) à un; solénoïde d’injecteur, solénoïde de vanne modulatrice, relais AC, solénoïde de ventilateur, relais de chauffage d’admission, relais de démarreur, solénoïdes EGR, pour ne nommer que quelques choses que l’ordinateur peut contrôler. Le transistor est comme un relais à semi-conducteurs sans pièces mobiles. Certains ordinateurs avec moteur ont un module pilote séparé. Étant donné que ces périphériques de sortie génèrent le plus de chaleur dans l’ordinateur, de nombreux ordinateurs utilisent une conception à ailettes ou une plaque de refroidissement pour dissiper la chaleur.
Conseil d’entretien: les pilotes de sortie sont très sensibles aux surintensités (ampérage) et peuvent facilement être brûlés par une personne utilisant un cavalier ou une mauvaise procédure de test. Si vous avez un mauvais code d’erreur du pilote de l’injecteur n ° 5, le pilote de l’injecteur n ° 5 a probablement été grillé. Vérifiez la résistance du solénoïde de l’injecteur # 5. Une faible résistance ou un court-circuit pourrait augmenter l’ampérage et endommager le pilote d’injecteur.
Fonctionnement du système informatique
Les systèmes informatiques sont divisés en trois zones: entrée, traitement et sortie. L’entrée dans l’ordinateur tourne autour des capteurs et des commutateurs. Le traitement se fait à l’intérieur de l’ordinateur. Les sorties sont des appareils comme des solénoïdes, des injecteurs, des vannes de régulation de pression, des relais et des voyants lumineux.
Le système informatique fonctionne entièrement hors tension. La plupart des capteurs transforment un signal de tension, généralement un signal de 5 volts, en une tension entre 0 et 5 volts. La tension est alors interprétée comme une température, une pression ou une position par l’ordinateur. Certains capteurs envoient une tension analogique à l’ordinateur, ce qui signifie qu’il s’agit d’une tension constante ou variable et d’autres capteurs envoient un signal numérique CC, qui est un signal marche / arrêt ou un signal bas élevé. Lorsqu’un technicien connecte un outil d’analyse ou un ordinateur au système, il lit les températures en degrés, les pressions en PSI et les positions en pourcentages. L’ordinateur a traduit ces lectures pour nous. L’ordinateur branche les informations du capteur ainsi que d’autres informations dans un algorithme et fournit une réponse sur la marche à suivre pour faire fonctionner le système.
L’ordinateur est une collection de composants tels que la mémoire, les processeurs, les convertisseurs analogiques-numériques, les régulateurs de tension, les cartes de circuits imprimés et les transistors à peu près les mêmes qu’un ordinateur domestique. Les ordinateurs des véhicules doivent supporter beaucoup plus de variables de température, de vibrations et d’environnement. Cela étant dit, les ordinateurs exécutant les systèmes sur nos véhicules sont très fiables.
Lorsque l’ordinateur prend une décision à partir des informations fournies, il fait fonctionner des appareils tels que des solénoïdes, des relais, des moteurs et des voyants lumineux. De nombreux circuits du dispositif de sortie sont contrôlés du côté terre du circuit. Étant donné que la plupart des circuits informatiques sont des circuits à faible ampérage, l’ordinateur peut utiliser un relais pour contrôler un circuit à ampérage supérieur.
Exemple: la bobine d’embrayage AC est un électroaimant à fort ampérage (10A). L’embrayage CA est activé ou désactivé par l’ordinateur. L’ordinateur contrôle le chemin de terre de la bobine de relais CA (broches 85 et 86), qui est de faible intensité (.15A). Le magnétisme généré par la bobine de relais ferme le contact NO (30 à 87) dans le relais et connecte l’ampérage élevé à la bobine AC. Cela permet à l’ordinateur de contrôler un dispositif à forte intensité avec un circuit de commande à faible intensité.
Lorsque l’ordinateur détecte un problème, il allume le témoin de dysfonctionnement ou MIL. Lorsque cela se produit, il stockera un code de panne que le technicien pourra récupérer. Un problème dans un circuit a généralement l’une des trois causes suivantes; l’ordinateur (très rare), le composant (40% ou mieux) et le câblage (40% ou mieux). Cela signifie que la plupart du temps, le problème sera lié aux composants ou au câblage.
Capteur de température
 to change voltage into temperature.")
Capteurs de température
Un capteur de température est également appelé thermistance. La résistance à l’intérieur est sensible à la température. Lorsque la température change autour de la résistance, la valeur de la résistance change. Il existe deux types de thermistances utilisées dans les véhicules; Coefficient de température négatif ou NTC, qui est le plus courant, et Coefficient de température positif ou PTC, rarement utilisé dans les véhicules.
Les thermistances NTC augmentent la résistance lorsque la température descend et diminuent la résistance lorsque la température monte. La résistance et la température vont dans des directions opposées.
Les thermistances PTC augmentent la résistance lorsque la température monte et diminue la résistance lorsque la température baisse. La résistance et la température vont dans le même sens.
L’ordinateur envoie une tension de 5 volts au capteur et surveille la tension.
Le capteur comporte deux fils: le fil 5 volts et un fil de terre.
Le capteur a deux broches qui se connectent à la résistance du capteur.
Le circuit doit être complet pour que le capteur puisse lire correctement. Si le 5 volts ou le fil de terre a un problème, le capteur ne peut pas être lu correctement. Cela donnera généralement une lecture de température d’environ -36 ° F. Ceci est un cadeau mort, le circuit du capteur a un circuit ouvert.
Le capteur doit être exposé à la température de l’air ou du fluide qu’il détecte.
Les thermistances NTC sont utilisées pour, entre autres lectures de température:
Température du liquide de refroidissement du moteur ou ECT
Capteur de température de l’air ambiant ou AAT
Température de l’air du collecteur ou MAT
Température d’huile de transmission ou TOT
Température de l’essieu moteur
Température du carburant ou FTS
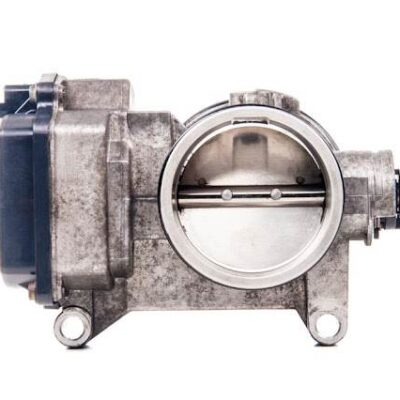
Potentiomètres
Le potentiomètre le plus courant est le capteur de position du papillon situé sur le corps de papillon ou la pédale d’accélérateur.
Potentiomètres
Les potentiomètres sont des capteurs de position. Le potentiomètre le plus populaire est le capteur de position du papillon sur la pédale d’accélérateur. Dans cette section, nous utiliserons le capteur de position des gaz (TPS) également appelé capteur de position de pédale d’accélérateur ou pédalier électronique comme exemple, car il est le plus courant.
Remarque: sur de nombreux moteurs à essence, le TPS est situé sur le corps de papillon du moteur. Avec les accélérateurs électroniques ou les moteurs diesel électroniques, le TPS est situé sur la pédale d’accélérateur.
Le TPS utilise une connexion à trois fils.
Une tension de référence de 5 volts ou VREF est envoyée au capteur depuis l’ordinateur.
Circuit de mise à la terre soit à la masse du châssis, soit à la masse à travers l’ordinateur.
Le fil de signal correspond à la tension variable entre 0 et 5 Volts lorsque le bras du capteur de balayage gratte la résistance du capteur.
Le 5 Volt VREF est la tension source du capteur. Ce 5 volts peut être partagé par d’autres capteurs. Cela signifie qu’un problème avec ce circuit peut affecter plusieurs capteurs.
Le circuit de masse complète le circuit de 5 volts à travers la résistance à la terre. Le sol peut également être partagé avec d’autres capteurs.
Le fil de signal est comme un voltmètre faisant une chute de tension à travers la résistance. Au ralenti ou en pédale en position relâchée, la tension est une lecture basse tension, généralement comprise entre 0,5 et 1,0 Volt.
À plein régime ou WOT, la tension est élevée, entre 4,5 et 4,8 Volts.
Le TPS définit généralement un code d’erreur si la tension du fil de signal est de 0 ou 5 volts. Le signal ne doit jamais atteindre ces extrêmes.
Lorsque la pédale est enfoncée, la tension augmente du minimum d’environ 0,5 volt à environ 4,8 volts. Les premiers capteurs TPS étaient réglables et, plus tard, les capteurs TPS, l’ordinateur «apprenait» les tensions minimale et maximale. Grâce à un outil de numérisation ou un PC, il s’agit généralement d’une position d’accélération de 0% à 100%.
Capteurs de pression

Les capteurs de pression sont appelés capteurs à capacité variable ou piézorésistifs. Ils sont utilisés pour mesurer diverses pressions sur les véhicules. Certaines des pressions que ce type de capteur peut mesurer sont; pression atmosphérique (BARO ou pression barométrique), pression ou dépression du collecteur d’admission, pression absolue du collecteur (MAP) ou pression de suralimentation (BPS), pressions d’huile (OPS), pressions de carburant, pressions du système de climatisation et pression d’huile de transmission.
[B] Câblage du capteur de pression
Les capteurs de pression sont des capteurs à trois fils configurés de manière similaire au TPS.
Un capteur de pression utilise une connexion à trois fils.
Une tension de référence de 5 volts ou VREF est envoyée au capteur depuis l’ordinateur.
Circuit de mise à la terre soit à la masse du châssis, soit à la masse à travers l’ordinateur.
Le fil de signal est la tension variable entre 0 et 5 volts lorsque la pression modifie la résistance à travers le capteur et sa tension de signal.
Le VREF 5 Volts est la tension source du capteur. Ce 5 volts peut être partagé par d’autres capteurs. Cela signifie qu’un problème avec ce circuit peut affecter plusieurs capteurs.
Le circuit de masse complète le circuit de 5 volts à travers la résistance à la terre. Le sol peut également être partagé avec d’autres capteurs.
Le fil de signal enverra un signal à l’ordinateur entre 0,5 et 4,8 Volts en fonction de la pression qu’il a détectée.
Deux types de capteurs de pression sont les plus populaires:
Un capteur à capacité variable utilise un disque en céramique qui, lorsque la pression est appliquée, se rapproche ou s’éloigne d’un disque en acier. Cela modifie la valeur de capacité et modifie la tension du signal vers l’ordinateur.
Un capteur de type piézorésistif est également appelé pont de Wheatstone. Il utilise une puce en silicium qui fléchit et modifie sa valeur de résistance pour modifier le signal renvoyé à l’ordinateur.
L’ordinateur change ce signal de tension en une lecture de pression.
Capteurs à aimant permanent

Capteurs de vitesse et de position
Il existe de nombreuses zones du véhicule où la vitesse de rotation doit être mesurée. Sur les moteurs électroniques, la vitesse et la position du moteur sont importantes pour le calage de l’injection de carburant. Certains des capteurs de vitesse sont:
vitesse de roue (WSS),
vitesse du véhicule (VSS),
vitesse d’entrée de transmission (TIS),
vitesse de sortie de transmission (TOS),
vitesse et position du vilebrequin (CKT)
et la vitesse et la position de l’arbre à cames (CMP).
Deux types de capteurs de vitesse et de position utilisés dans les véhicules d’aujourd’hui; le générateur d’aimants permanents et le capteur à effet Hall. Le générateur à aimant permanent ou générateur d’impulsions à induction est largement utilisé pour les capteurs de vitesse de véhicule, les capteurs de vitesse de roue, les capteurs de vitesse de transmission et les capteurs de vitesse de vilebrequin. Le capteur à effet Hall est utilisé comme capteur de vitesse et de position précis pour la position et la vitesse du vilebrequin et de l’arbre à cames.
Fonctionnement des générateurs à aimants permanents
Les générateurs à aimants permanents utilisent un aimant permanent entouré d’une fine bobine de fil. Une bague de tonalité ou une roue de reluctor a un bord relevé suivi d’un espace bas. L’aimant est très proche de l’anneau. Lorsque l’anneau tourne au-delà de l’aimant, le bord surélevé crée un champ magnétique autour de l’aimant. Alors que l’anneau continue de tourner, l’espace bas vient de l’aimant. Cela affaiblit le champ magnétique et s’effondre à travers la bobine de fil, générant un faible courant alternatif. À mesure que l’anneau s’accélère, les impulsions deviennent plus fortes, plus fréquentes et produisent plus de courant. Pour la plupart des applications, les espaces hauts et bas sont répartis uniformément autour de l’anneau. Si le capteur est utilisé pour la vitesse et la position du moteur, une encoche impaire identifiera cette position à l’ordinateur en faisant varier le signal chaque fois que l’encoche impaire passe devant le capteur. Le jeu entre le capteur et l’anneau est critique. Trop d’espace et le signal sera faible ou perdu. Trop proche et le capteur peut être endommagé.
Fonctionnement du capteur à effet Hall
Un capteur à effet Hall est un capteur numérique CC. Cela signifie qu’il produit un signal haut bas qui est une onde carrée et non un signal analogique. Il produit également un signal de tension continue. Ce type de capteur nécessite trois fils pour fonctionner. L’effet Hall est la rotation d’une roue de tonalité ou d’une roue d’impulsions qui contient une partie pleine ou une palette et une fenêtre. Lorsque la roue tourne alternativement entre la fenêtre et l’aube, le capteur envoie un signal numérique marche / arrêt. Une forme de fenêtre étrange permet à l’ordinateur de détecter un emplacement sur la roue phonique pour la position du moteur. Ce type de capteur est utilisé le plus souvent pour les capteurs de position d’arbre à cames et de vilebrequin. Comme ce signal est une tension plus élevée et un signal numérique, le signal envoyé à l’ordinateur est plus précis et plus fiable. Le jeu entre la roue phonique et le capteur est extrêmement important.
Les trois fils nécessaires au fonctionnement d’un capteur à effet Hall sont:
L’alimentation peut être de 5 à 12 volts selon le fabricant. Vérifiez les spécifications.
Le fil de terre peut être mis à la terre à travers l’ordinateur ou partager la terre avec d’autres capteurs.
Le fil de signal a un signal marche / arrêt ou haute / basse tension de zéro à la tension source.
Conseil d’entretien: certains capteurs à effet Hall sont en fait deux capteurs en un. Ce sera généralement un capteur à 4, 5 ou 6 fils.
Capteur à effet Hall
Les capteurs à effet Hall produisent un signal marche / arrêt numérique CC.
Des dispositifs de sortie
Sur tout le câblage allant à un ECM du moteur (150 à 180 fils), seulement environ 10% est utilisé pour les actionneurs. Le reste du câblage est le câblage d’alimentation, de terre, d’interrupteur et de capteur. Avec un ordinateur moteur, les sorties seront généralement:
Solénoïdes d’injecteur de carburant
Solénoïdes de ventilateur
Solénoïdes de frein à compression
Solénoïdes de contrôle des émissions
Commandes de démarrage
Commandes du turbocompresseur
Avec les ordinateurs ABS / ATC, les sorties seront généralement deux solénoïdes de contrôle par valve modulatrice et un solénoïde de contrôle de traction automatique.